
Previous Story
小林孝稔のパノラマVR撮影講座
第3回 パノラマ雲台とノー・パララックス・ポイントについて

TOPIX
| 第3回目を迎えました小林孝稔のパノラマVR撮影講座は「 雲台 」と 「 視差 」について解説いたします。VR撮影では重要な視差が生じないポイントを探す手順につきまして詳細に解説をしております。VR撮影時には重要なポイントですのでぜひ参考にして下さい。 by 編集部 |
前回はパノラマVRの撮影に必要なカメラとレンズについて説明しましたが、今回は撮影に必要なパノラマ雲台と、パノラマVRの要であるノー・パララックス・ポイントについて説明します。
■ ノー・パララックス・ポイントとは!?
パノラマVRの撮影時には「 パノラマ雲台 」と呼ばれる特殊な雲台を使用します。パノラマ雲台を用いる理由は「 ノー・パララックス・ポイント 」が関係し、言葉の意味は「 ノー( No = 無い )・パララックス( Parallax = 視差 )・ポイント( Point = 点 )」、すなわち「 視差が生じない点 」の意味であり、簡単に言うとレンズ内で光が一点に集まる「 レンズ焦点の中心 」の事です。
ノー・パララックス・ポイントはパノラマVRの大変重要な要素であり、ノー・パララックス・ポイントを正しく設定出来るかがパノラマVRの仕上がりに大きく影響します。何故なら、パノラマVRは重なり合うように撮影した複数の写真をスティッチして作成するので、視差が生じている状態で撮影した写真では隣接する写真同士が大きくズレてしまい、結果としてスティッチしても写真同士が綺麗に繋がりません。
パノラマ雲台は水平と垂直の2方向に回転する様になっており、この回転軸上にノー・パララックス・ポイントを合わせるようにカメラをセットして撮影を行います。

パノラマ雲台にカメラをセットした様子。カメラの三脚穴を中心に回転する通常のカメラ雲台と違って、パノラマ雲台はレンズを中心に回転しているのがお分かり頂けるかと思います
( 画像をクリックしてGIFアニメーションを再生 )
Go To Top
■ ノー・パララックス・ポイントを見つけるには!?
ノー・パララックス・ポイントはレンズ固有の値( 位置 )であり、かつ同じレンズであっても絞りやピントの位置によっても僅かに値が変わります。ベーシックなパノラマVRの撮影で使用する魚眼レンズの様な超広角レンズのノー・パララックス・ポイントはレンズ内に存在し、パノラマ雲台に魚眼レンズを装着したカメラをセットした状態でノー・パララックス・ポイントを見つけます。
私は小型で軽量なパノラマ雲台「Nodal Ninja3 MkII」を使用しています。ここではNodal Ninja3 MkIIを例に説明しますが、市販のパノラマ雲台の大半は同じ機構・機能を備えていますので参考にしてください。
| ■amazon で価格チェック■ |
|---|
| Nodal Ninja3 MKII |

ミラーレス等の小型カメラに適したコンパクトなパノラマ雲台”Nodal Ninja3 MKII”。パノラマ雲台は様々な大きさの種類があり、使用するカメラとレンズの大きさに合った物を選んでください。
1)雲台の水平回転軸中心とカメラの中心を合わせる パノラマ雲台に魚眼レンズを装着したカメラをセットして、カメラを地( 真下 )に向けます。

パノラマ雲台にカメラをセットした状態でカメラを地( 真下 )に向けます

大半のパノラマ雲台には水準器が備わっていますので、水準器を頼りに正しく水平に設置します。また、可能であればカメラにも水準器を取り付けてカメラをしっかりと地( 真下 )に向けてください
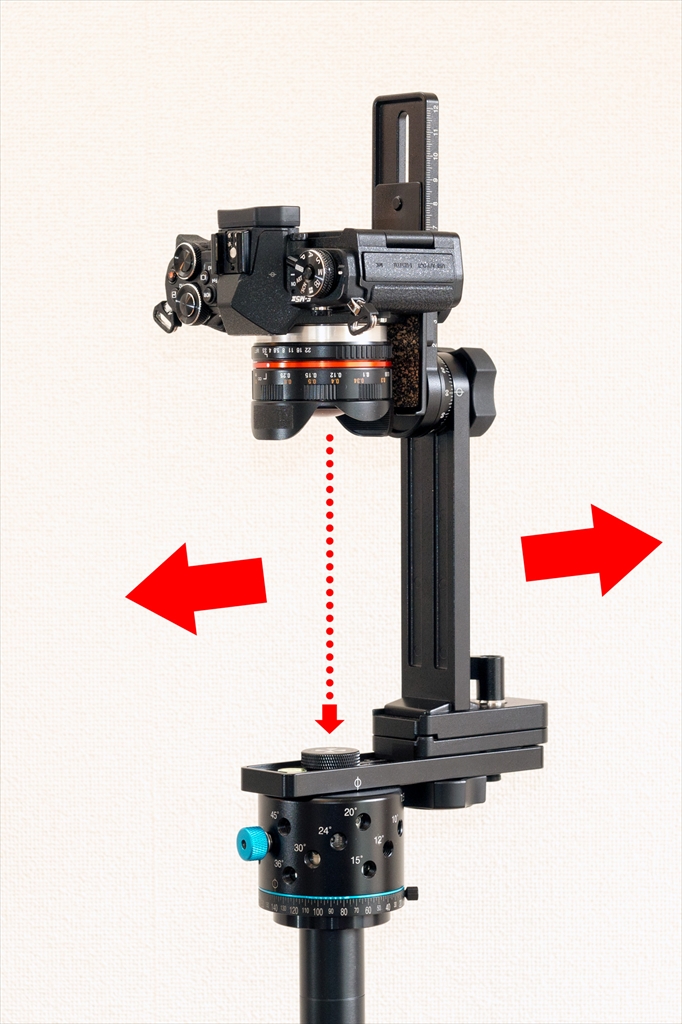
アームを前後に動かしてパノラマ雲台の水平回転軸の中心とレンズの中心をあわせます
その状態でパノラマ雲台の水平回転軸の中心と、レンズ( カメラの画像 )の中心を合わせます。大半のパノラマ雲台は回転軸上に何かしらのマークが打たれていますので、それを頼りに設定します。Nodal Ninja3 MKIIの場合は、先の水準器の後ろに見えていた白黒のマークの中心が回転軸上を指しています。
中心を合わせた後はその状態で撮影を行い、撮影した画像をパソコンで拡大表示して中心が一致しているかを確認してください。カメラに手ブレ補正機能が付いている場合は画像の中心からズレてしまう場合がありますので、手ブレ補正機能をOFFにした状態で撮影してください。

画像編集ソフト等を使って撮影した写真を開き、ガイド機能等を頼りに水平回転軸と画像の中心が一致しているかを確認してください
Go To Top
2)カメラを前後に動かしながら、前後の被写体がズレない位置を探す
次に、水平撮影を行う横位置にカメラ固定します。ある程度の前後の差がある被写体を目印にしてカメラを左右に振って撮影します。
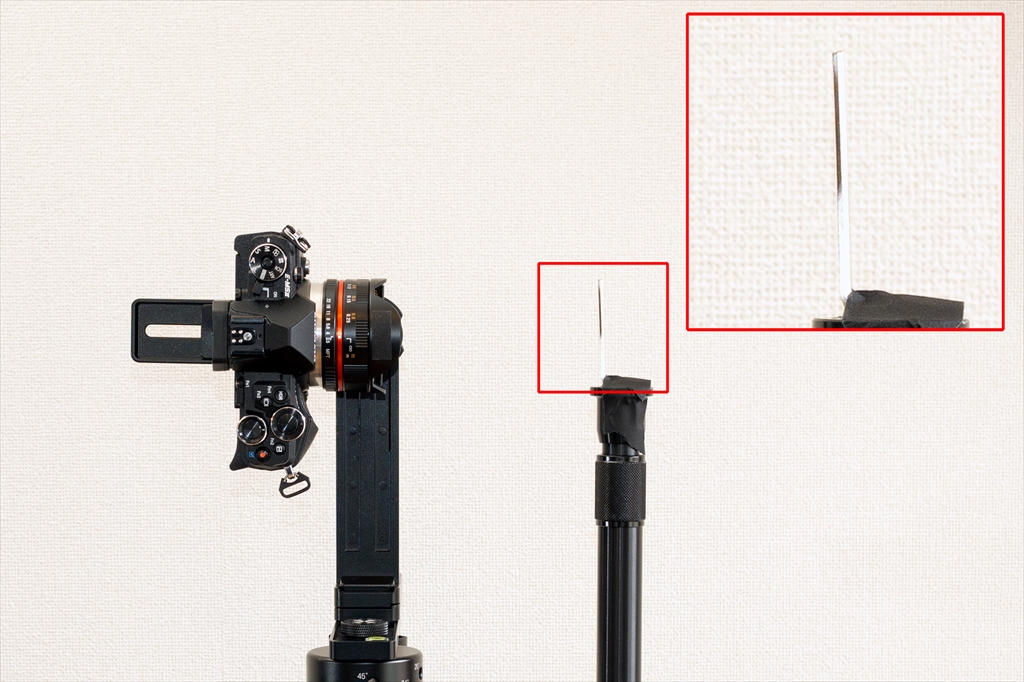
ある程度の前後の差がある被写体であれば目印は何でも結構です。ここでは目印としてカメラの前に金属の棒を置き、背後の壁にテープを貼って前後の被写体を作りました
前後の被写体がズレない位置を、カメラを前後に動かしながら探します。
カメラを前後に動かしながら、前後の被写体がズレない箇所を探します

カメラが正面の状態、金属の棒が手前の被写体、背後の黒いテープが奥側の被写体です

カメラを右に振った状態
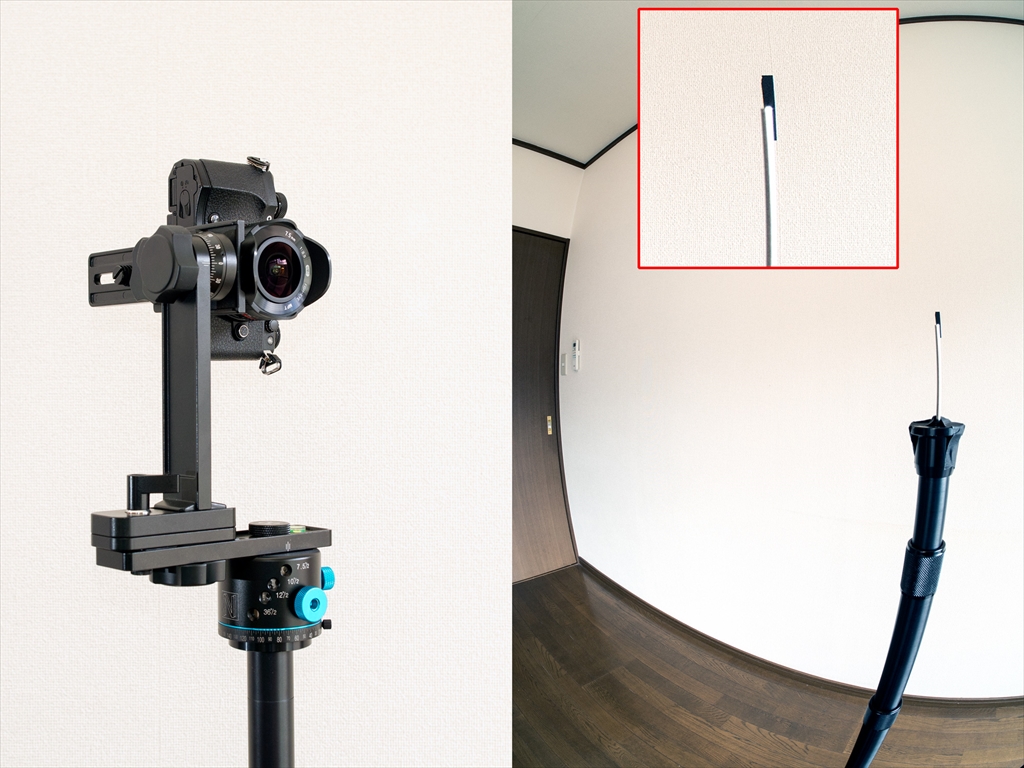
カメラを左に振った状態。この様にカメラを左右に振っても前後の被写体の位置関係がズレない位置を探します
カメラを左右に振っても前後の被写体がズレない位置が見つかったら、そこがノー・パララックス・ポイントです。もし、設定を何度繰り返しても下記の様に前後の被写体がズレてしまう場合は手順を戻り、水平回転軸の中心とレンズの中心が合っているかを今一度確認してください。

視差が生じている場合。カメラを左右に振った際に前後の被写体がズレてしまっています
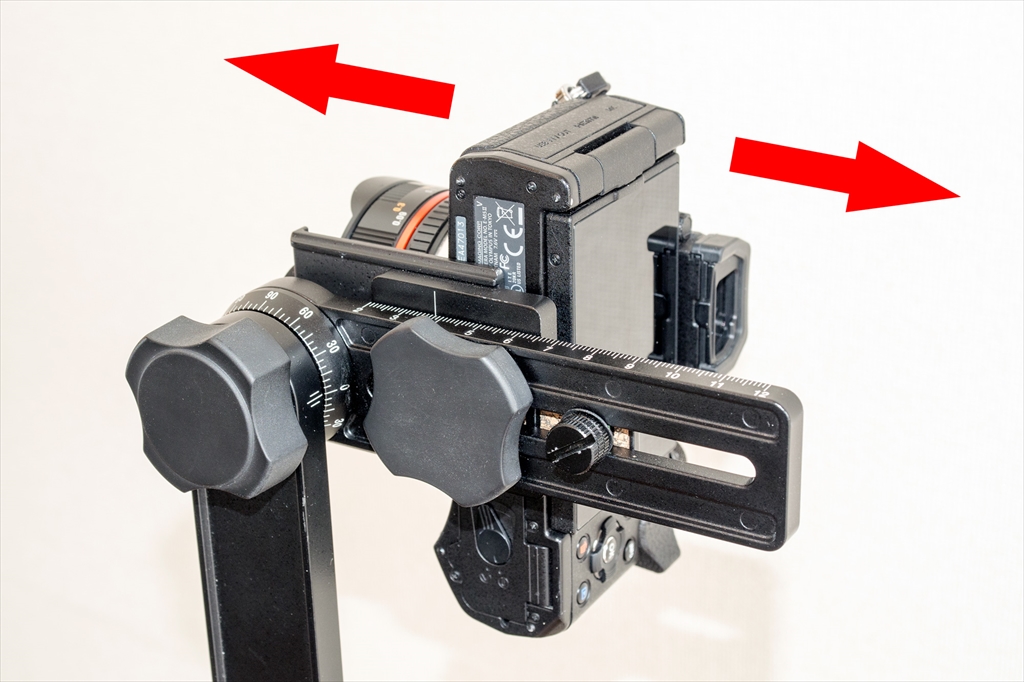
以上でノー・パララックス・ポイントが見つかりました。一度ノー・パララックス・ポイントを見つけてしまえば、以降、セッティングを変更しない限りはそのまま撮影を行う事ができますので、しっかりと雲台のネジを締めて固定しましょう。また、値をメモに控えておくのも良いでしょう。

パノラマ雲台のネジを締めてノー・パララックス・ポイントがズレないように固定しましょう

パノラマ雲台の設定値をメモに控えておくのも良いでしょう
先述の通りノー・パララックス・ポイントは絞りやピントの位置によっても値( 位置 )が僅かに異なるので、予め撮影を想定したセッティングでノー・パララックス・ポイントを見つけるのが望ましいです。パノラマVRは基本的にパン・フォーカスで撮る事が多いので、私は基準となる絞りをF8と想定した状態でノー・パララックス・ポイントを見つけて、現場で必要に応じて絞りを±1段分程度を調整する方法を取っています。もちろん、絞りの値を変更するとノー・パララックス・ポイントの値も変わってしまいますが、僅かな変化量なのでスティッチ・ソフトウェアで吸収できる範囲です。ただし、これらはレンズに因るので、ご自身で手持ちのレンズを使って試行錯誤を繰り返し、最適な値と方法を探してください。
ノー・パララックス・ポイントが見つかれば次は撮影です。次回はベーシックなパノラマVRの撮影方法を順を追って説明致します。お楽しみに。
Go To Top
関連記事を読む
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第8回 PTGui Proによるスティッチ解説03~ ワークフロー02
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第9回 PTGui Proによるスティッチ解説04~ ワークフロー03
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第5回 VR撮影時の設定と撮影方法 ( 後編 )
 小林孝稔のパノラマVR撮影講座第10回 PTGui Proによるスティッチ解説05~ ワークフロー04
小林孝稔のパノラマVR撮影講座第10回 PTGui Proによるスティッチ解説05~ ワークフロー04
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第14回 オーサリングについて02
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第4回 VR撮影時の設定と撮影方法 ( 前編 )
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第12回 HDR合成について
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第2回 パノラマVRに必要なカメラとレンズは?
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第1回 パノラマVRとは?
 小林孝稔のパノラマVR撮影講座
小林孝稔のパノラマVR撮影講座第6回 PTGui Proによるスティッチ解説01
– スティッチとは!?





























